
200平方公里实景三维建模项目案例分享
瞰景Smart3D软件系统200平方公里实景三维建模项目案例,现分享给大家。
1
项目简介
① 测区范围:200平方公里。
② 数据情况:310590张影像数据,地面分辨率3cm。
③ 相机型号:瞰景“小怪兽”Monster航摄仪,照片尺寸11608*8708。
④ 软件:瞰景Smart3D 2023实景三维建模软件。
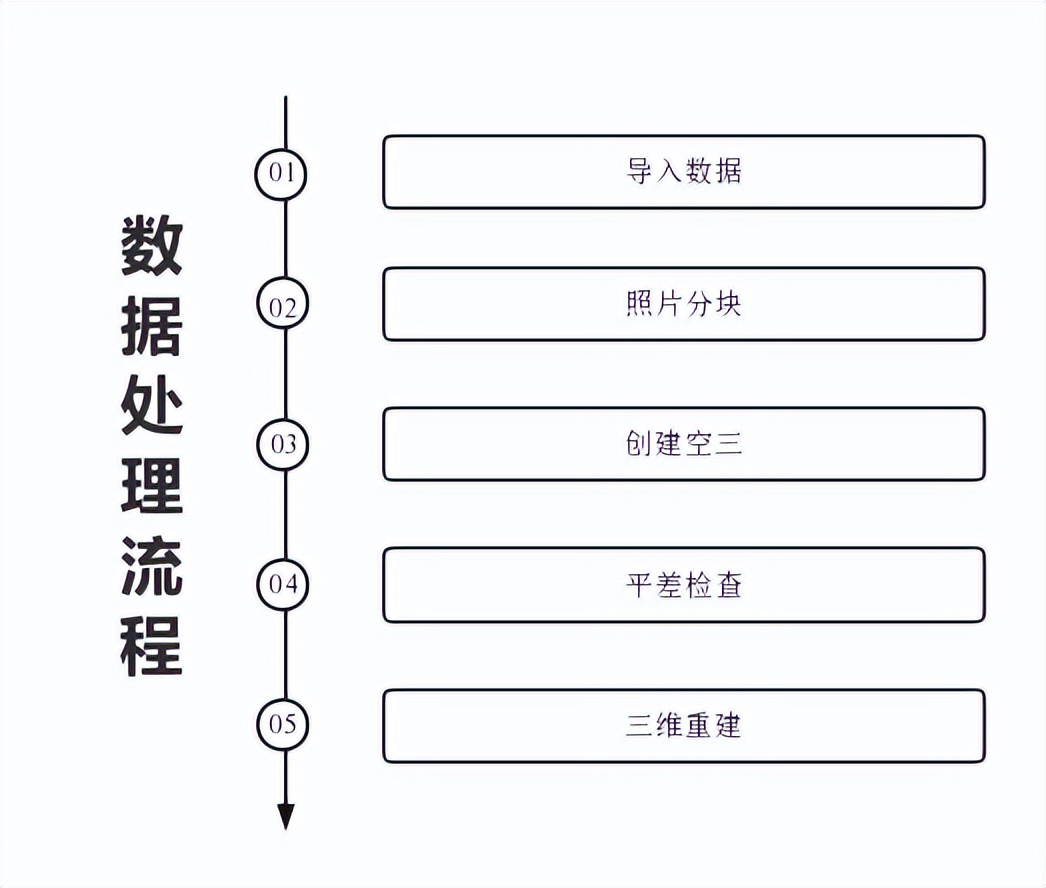
2
项目处理流程
3
具体操作流程
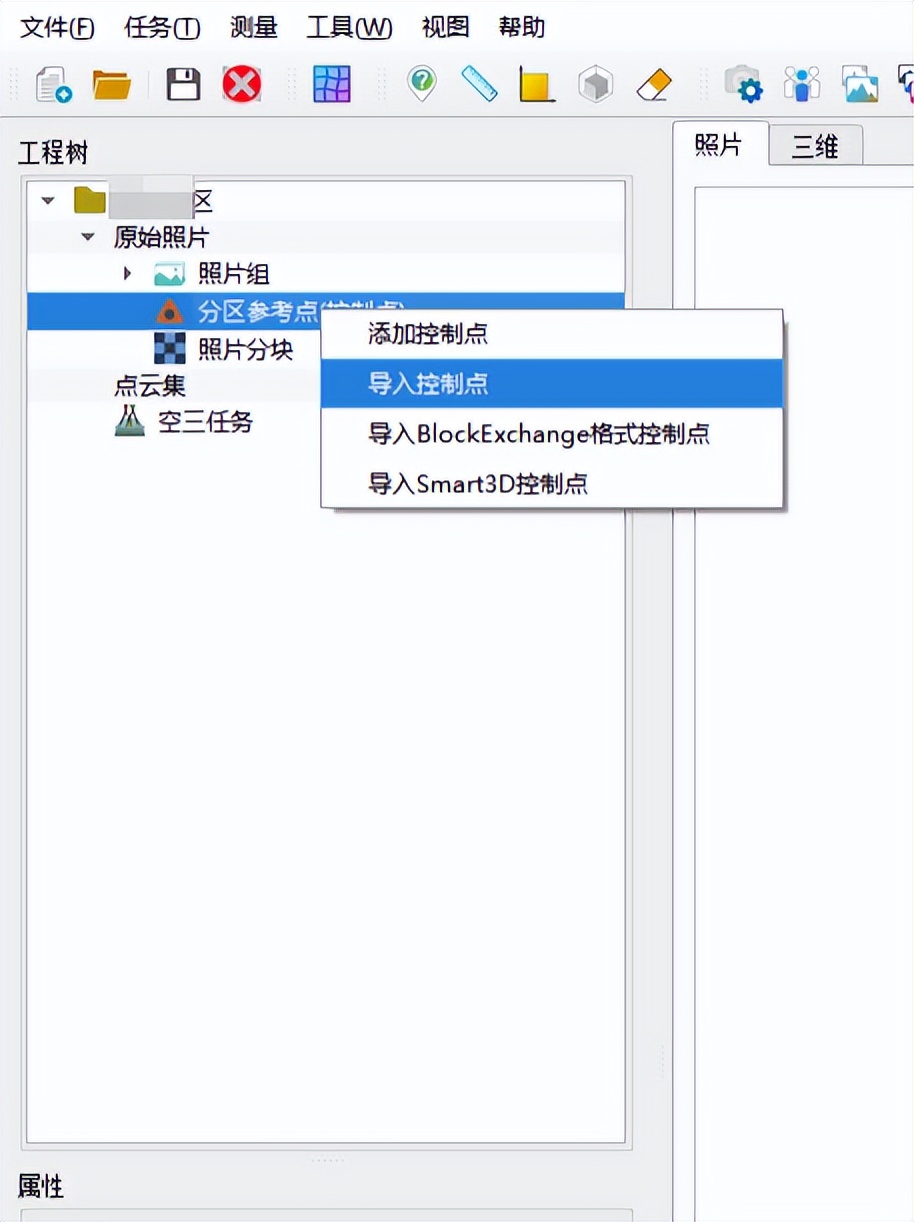
3.1 数据导入
首先打开Smart3D软件,新建工程。然后在照片组位置导入数据影像和对应的位置信息,再右击分区参考点导入控制点信息。
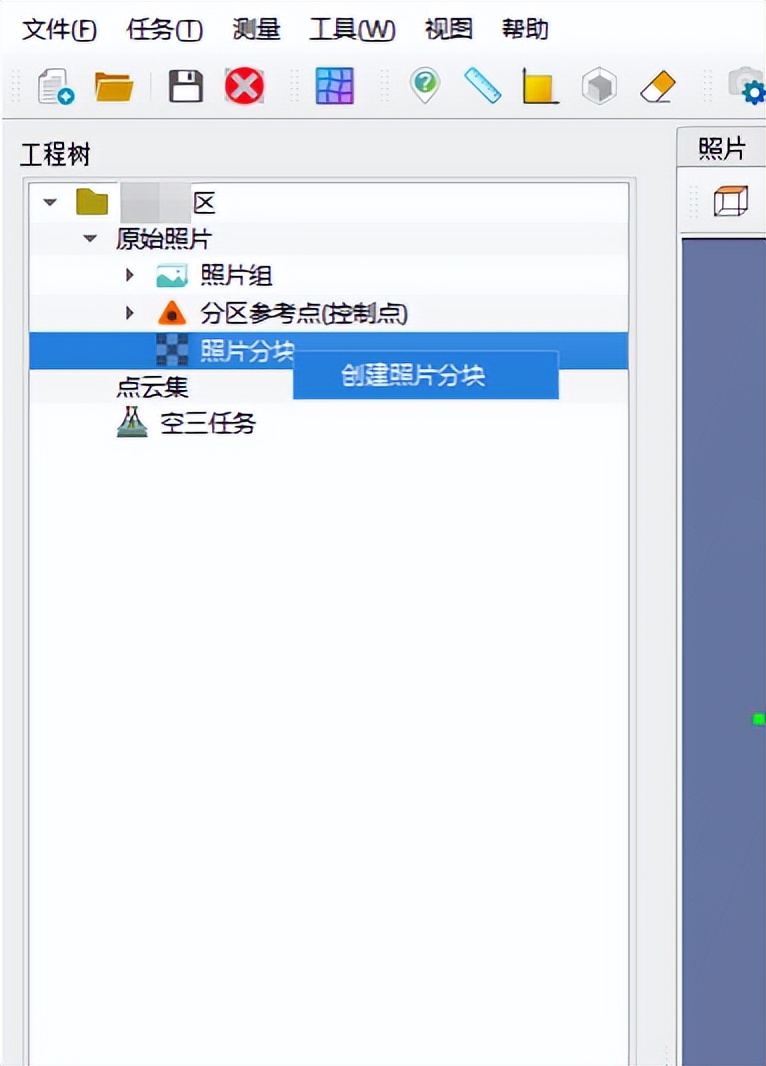
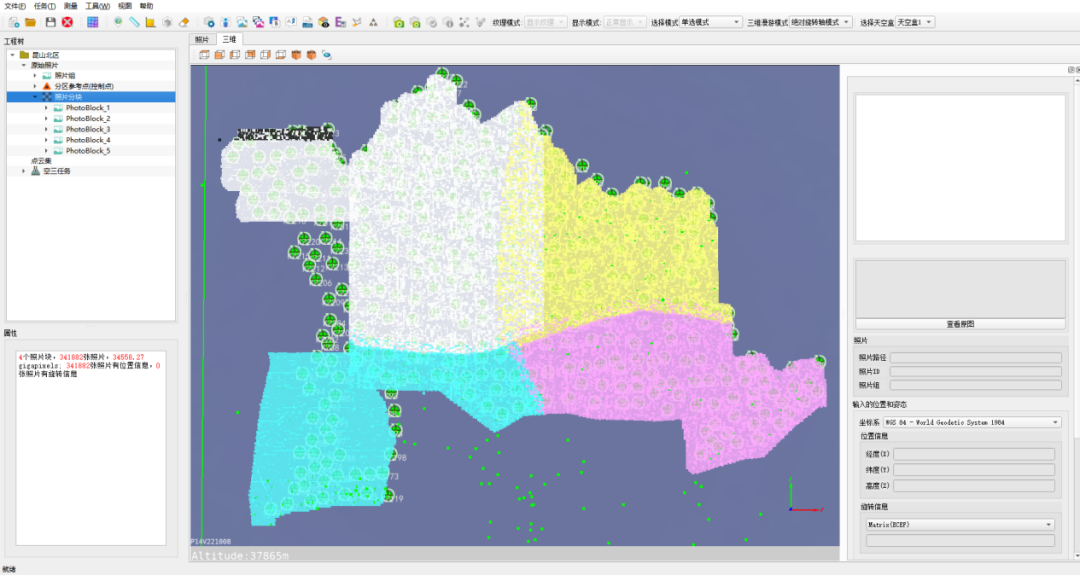
3.2 照片分块
首先在照片分块的位置右击,点击创建照片分块。配置分块属性。
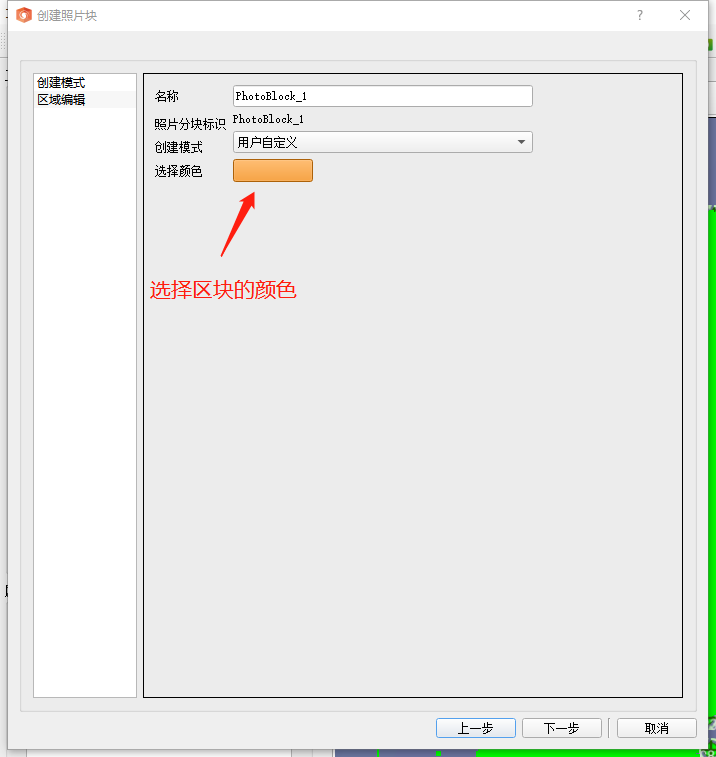
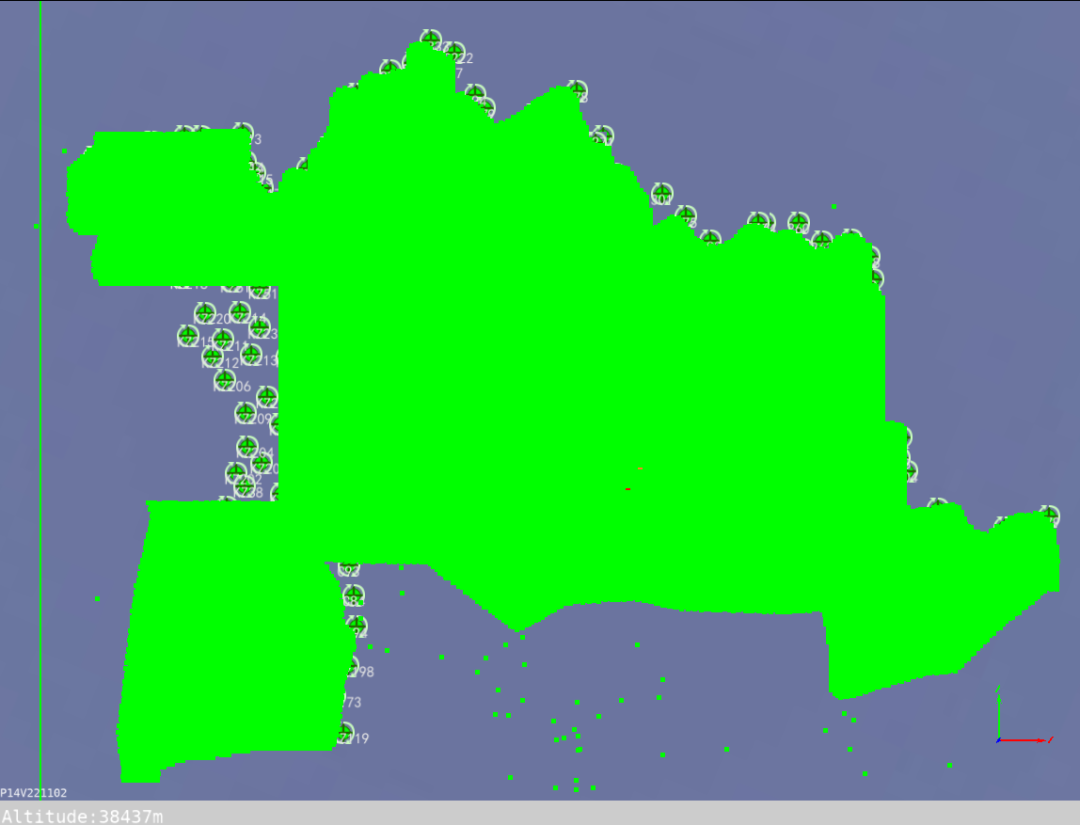
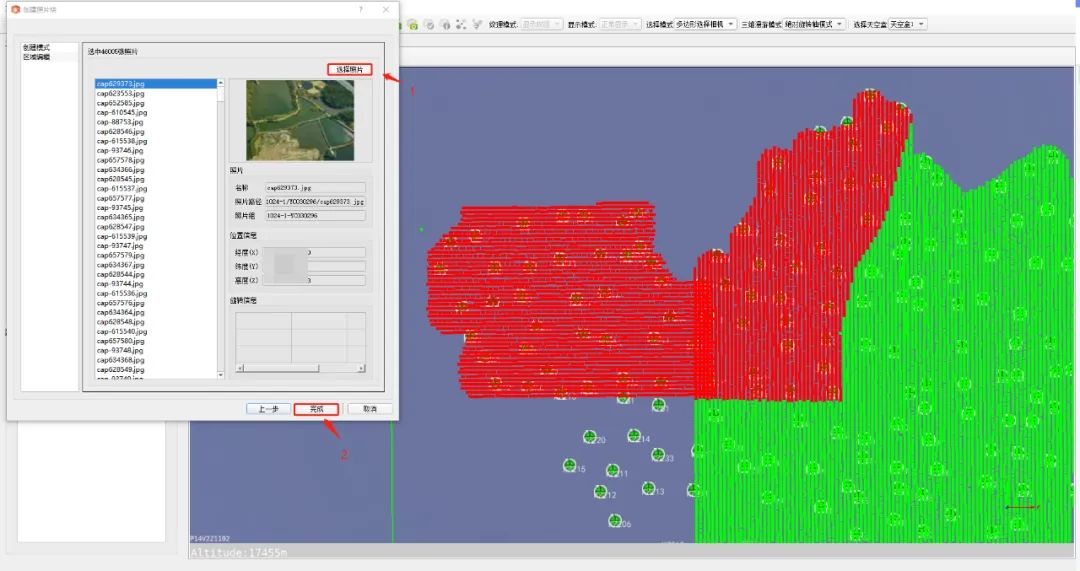
先点击选择照片按钮,然后可以更换选择模式再去划分照片。
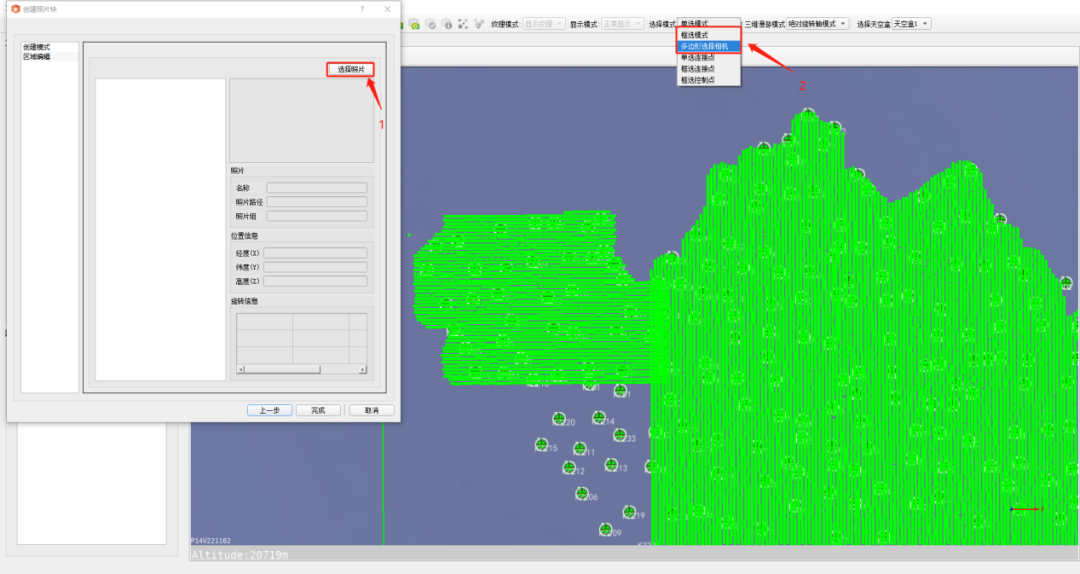
划分区块的时候一定要沿着控制点的分布去进行划分,块与块之间需要有公共点和部分重叠的照片。如下图所示:
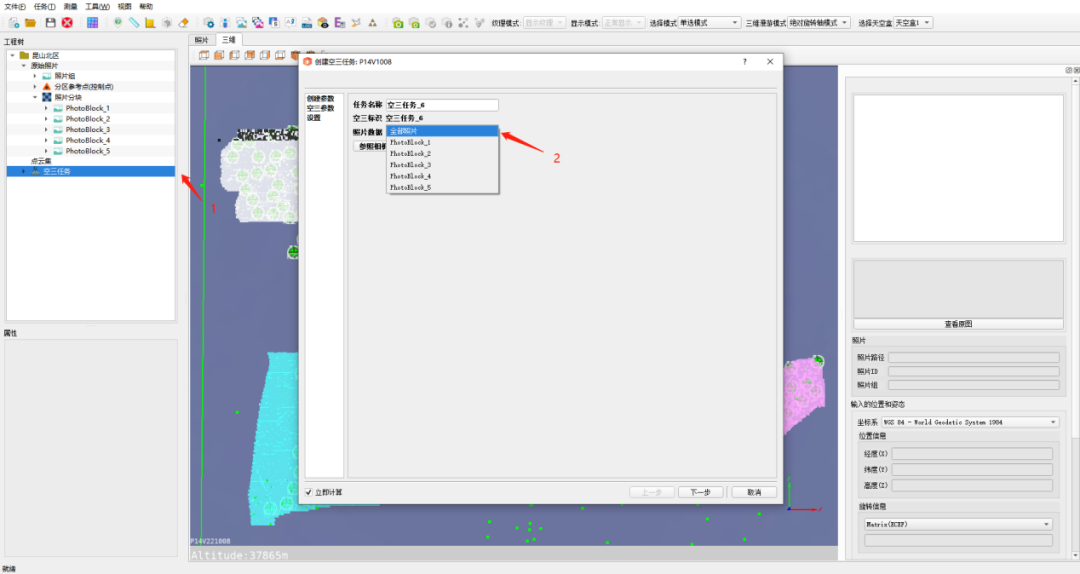
3.3 创建空三任务
右击空三任务创建,分别在照片数据源选项中选择对应的区块,提交空三,一个分块对应一个空三任务,每块都提交空三(由于项目比较着急,数据是边飞行边处理的,提交空三的时间跨度较大)。
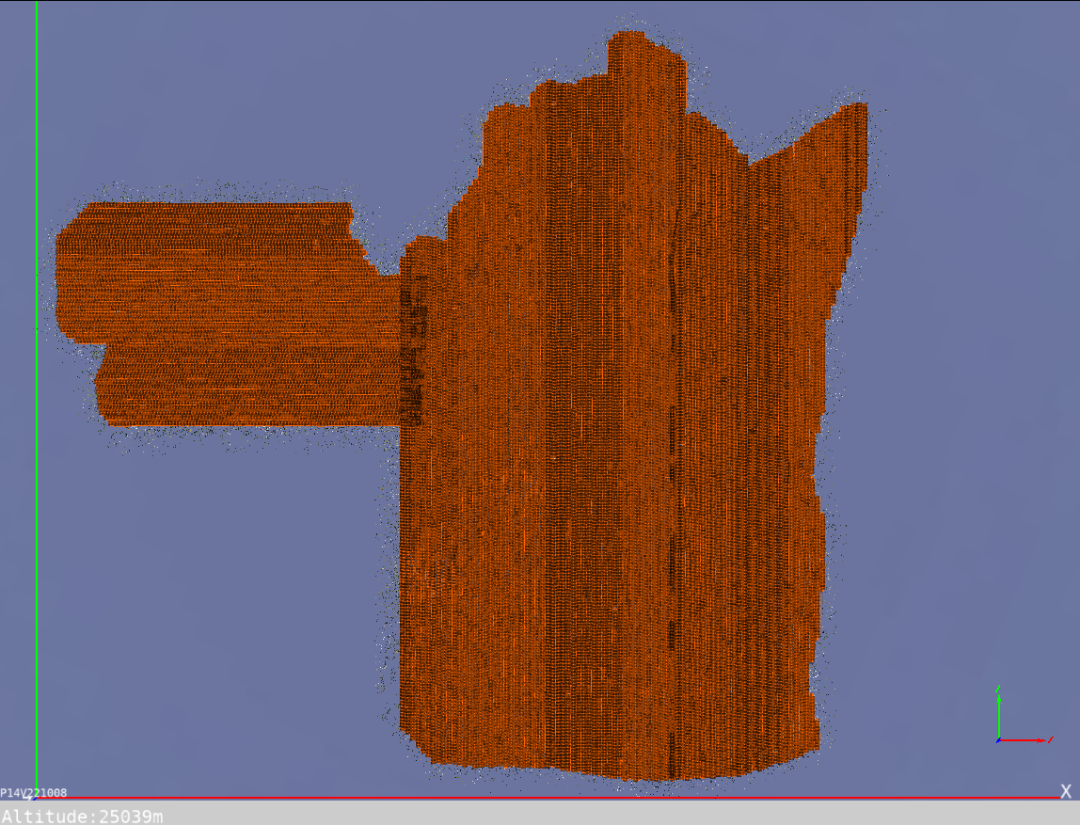
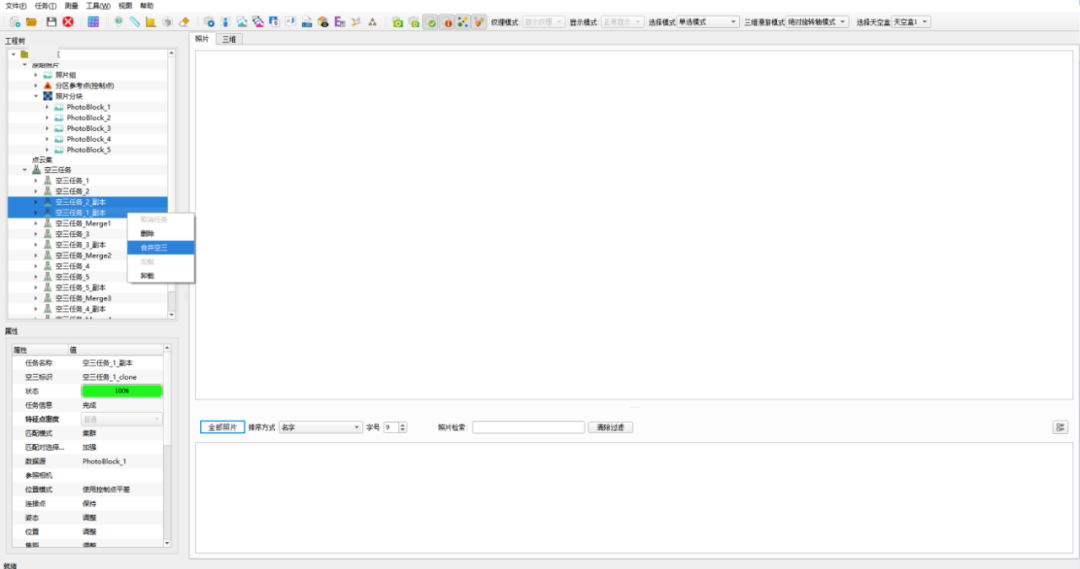
3.4 平差检查
空三完成后查看空三相机位置和连接是否平整,没有问题就分别复制空三任务。

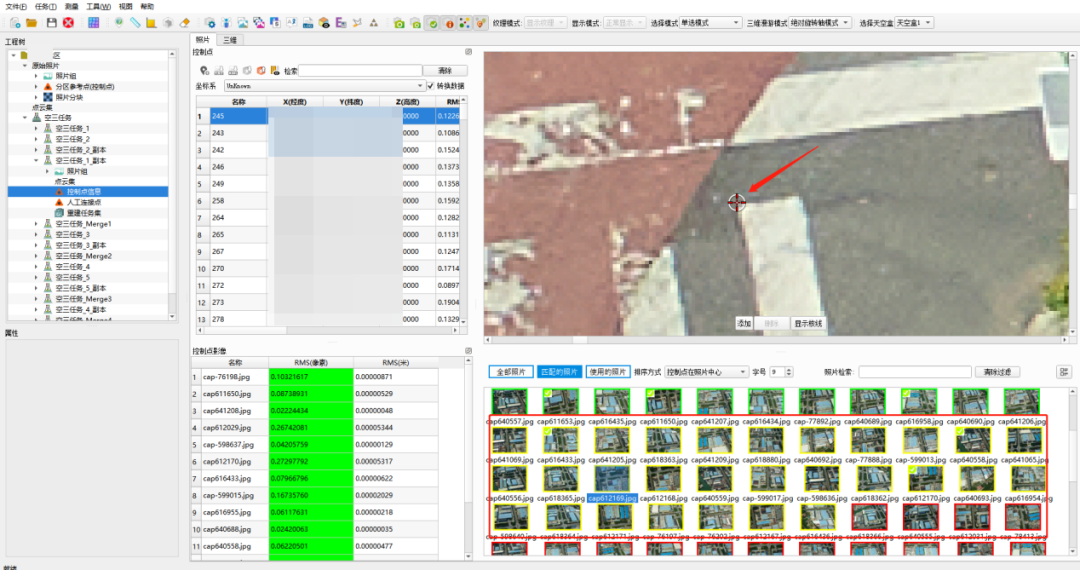
在复制下来的空三任务里导入控制点文件,进行刺点。
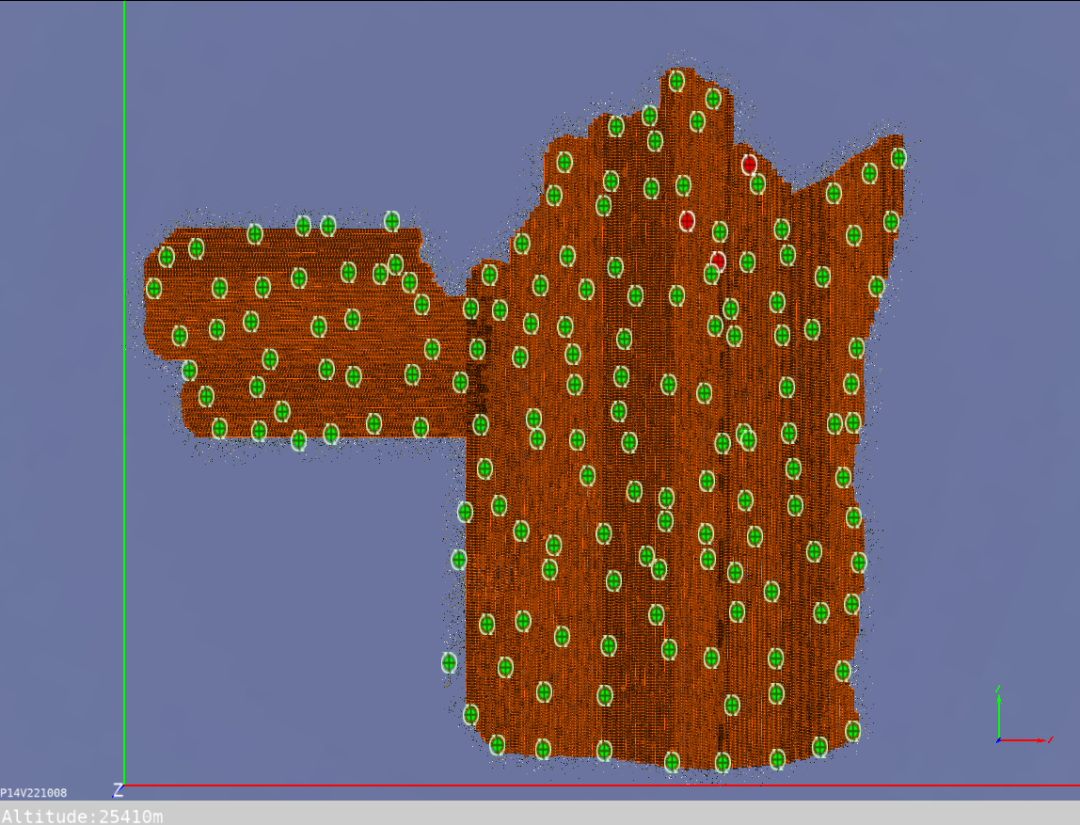
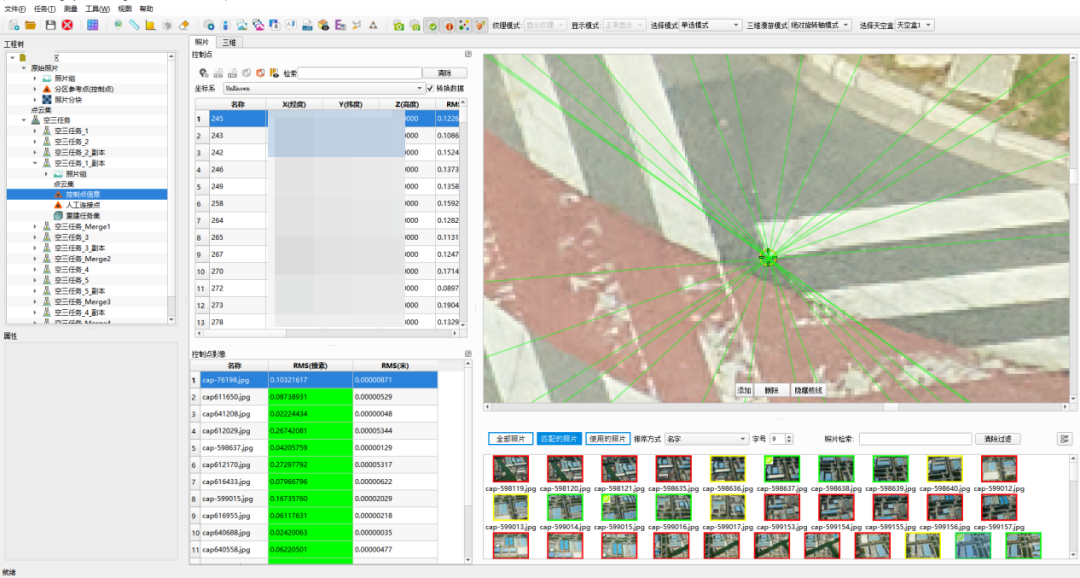
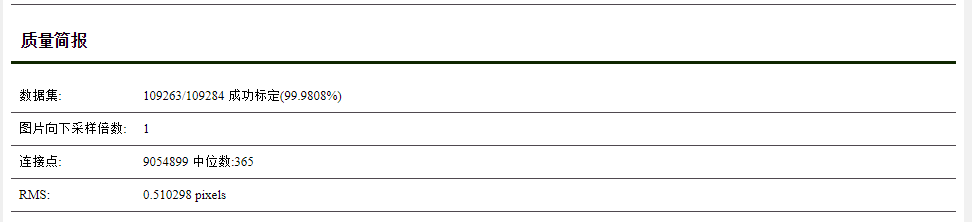
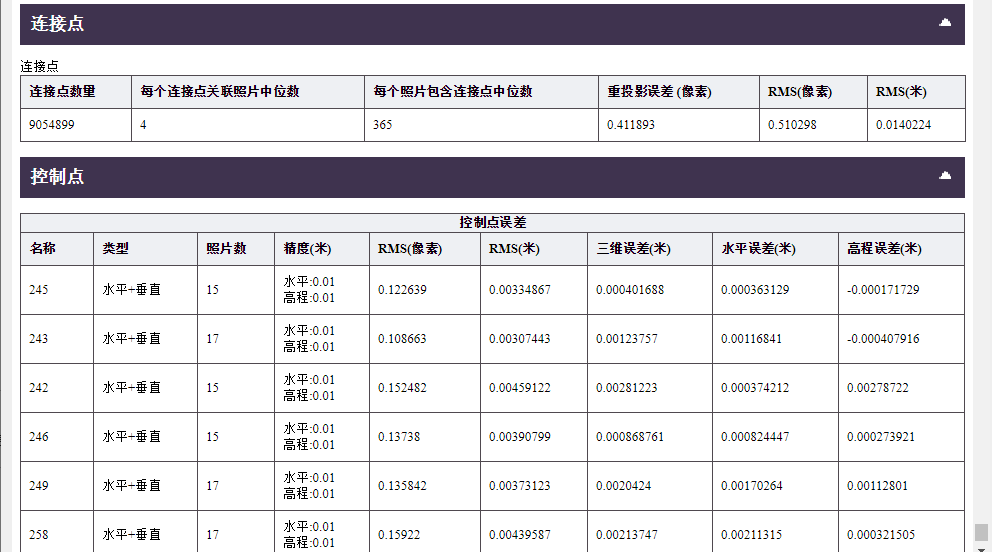
平差完成后需查看每个空三任务的空三报告和控制点的精度,还可以查看控制点关联的未刺黄色照片点位预测位置是否准确。
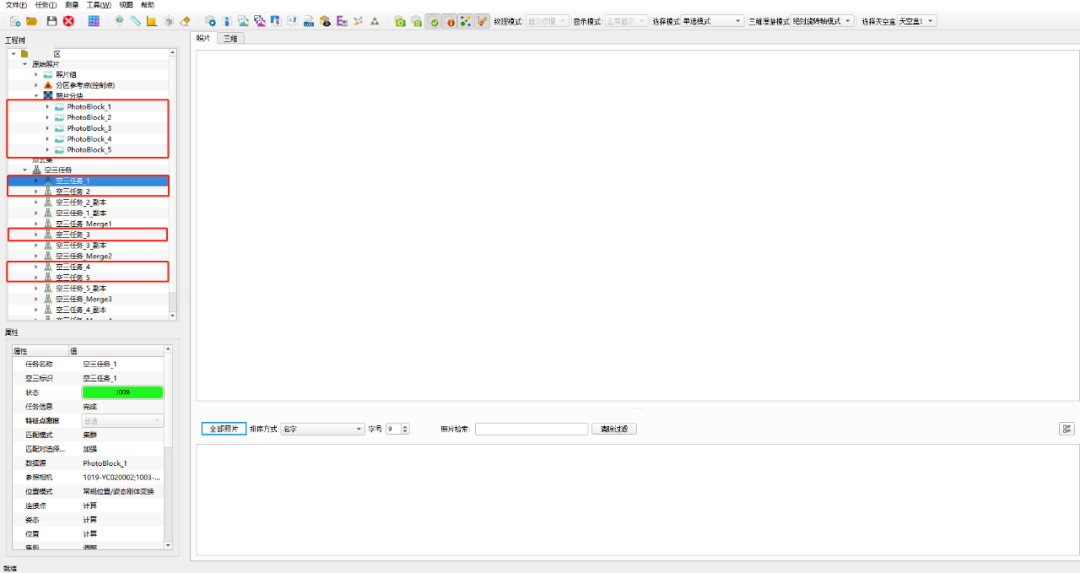
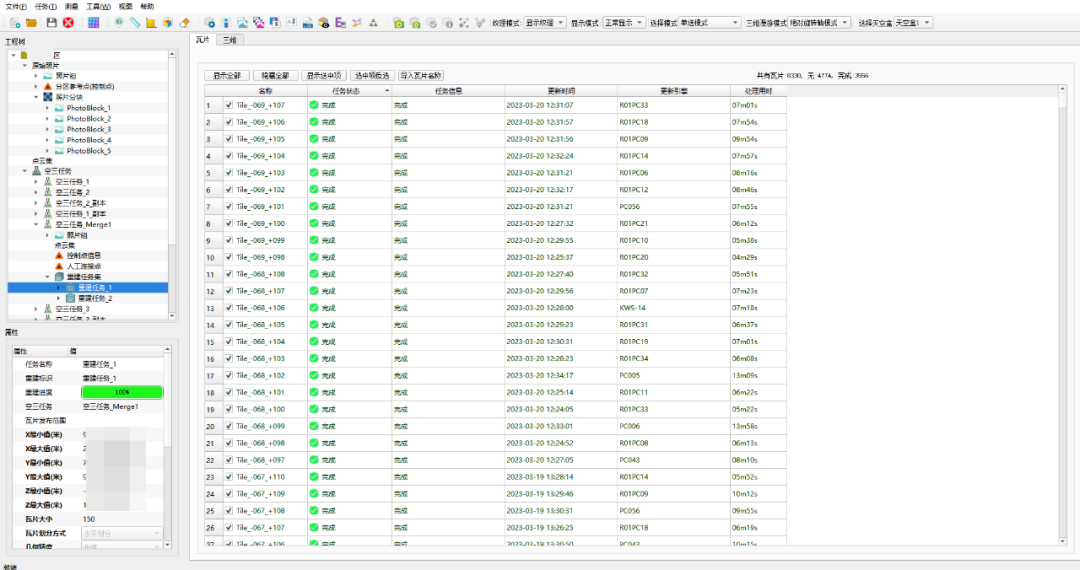
3.5 三维重建
选中在平差完成的空三(空三是相邻的),右击选择合并空三。
提交三维重建须在合并的空三任务里进行创建提交。
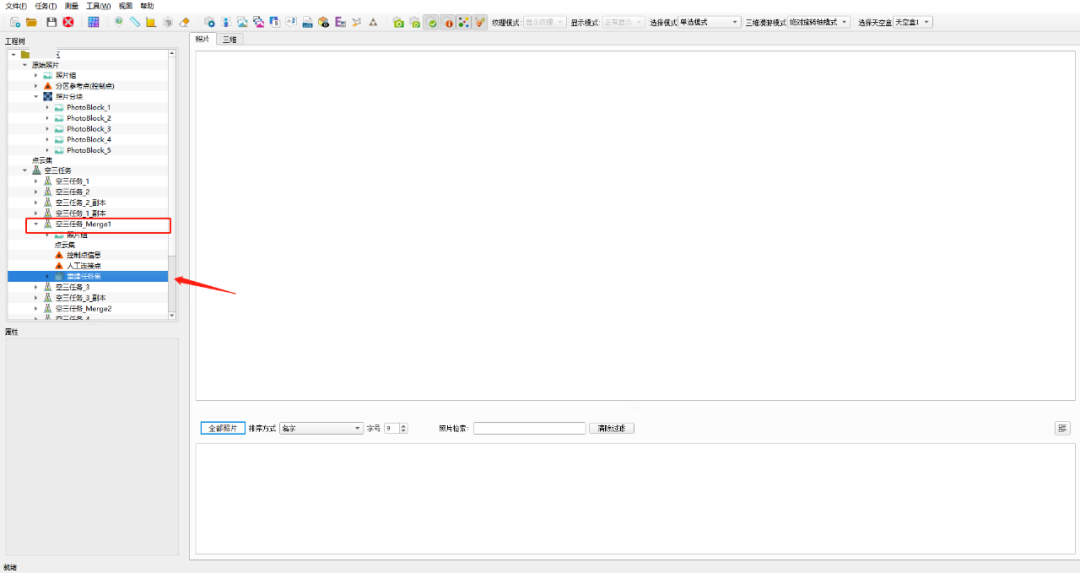
由于项目比较着急,所以空三每处理一块就会和相邻的空三进行合并,然后提交建模。
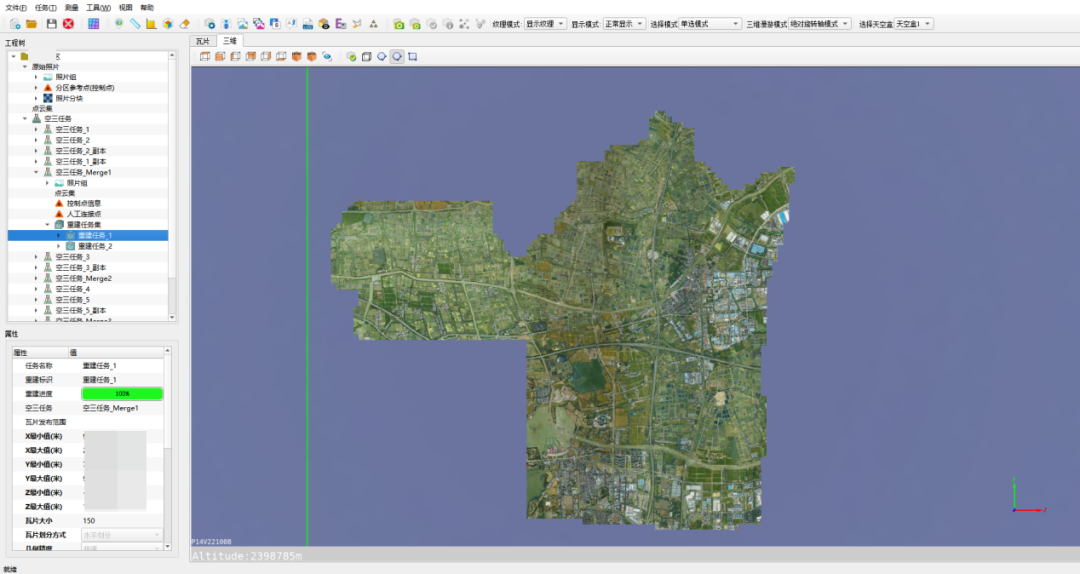
4
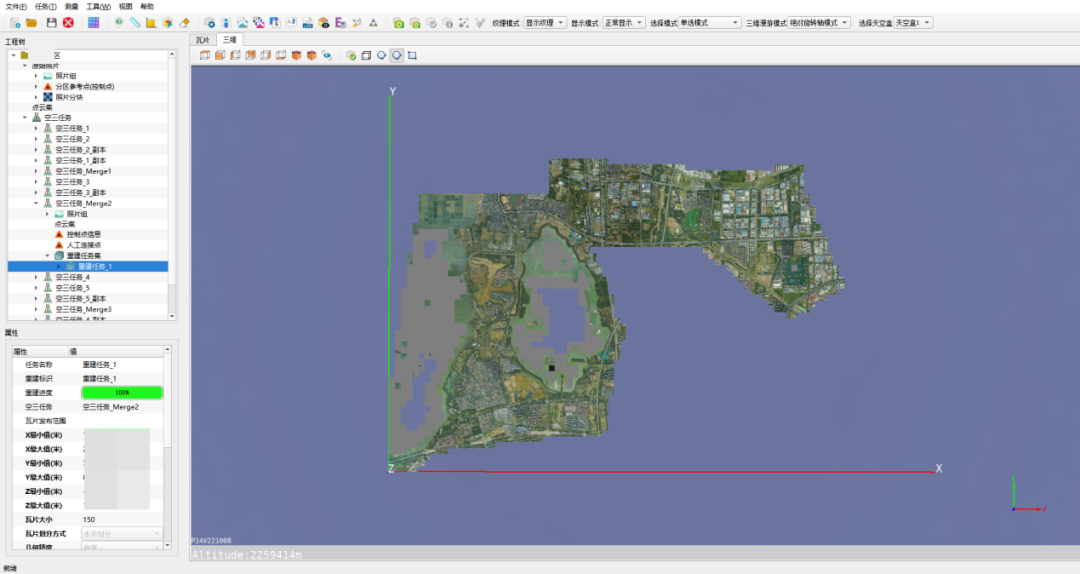
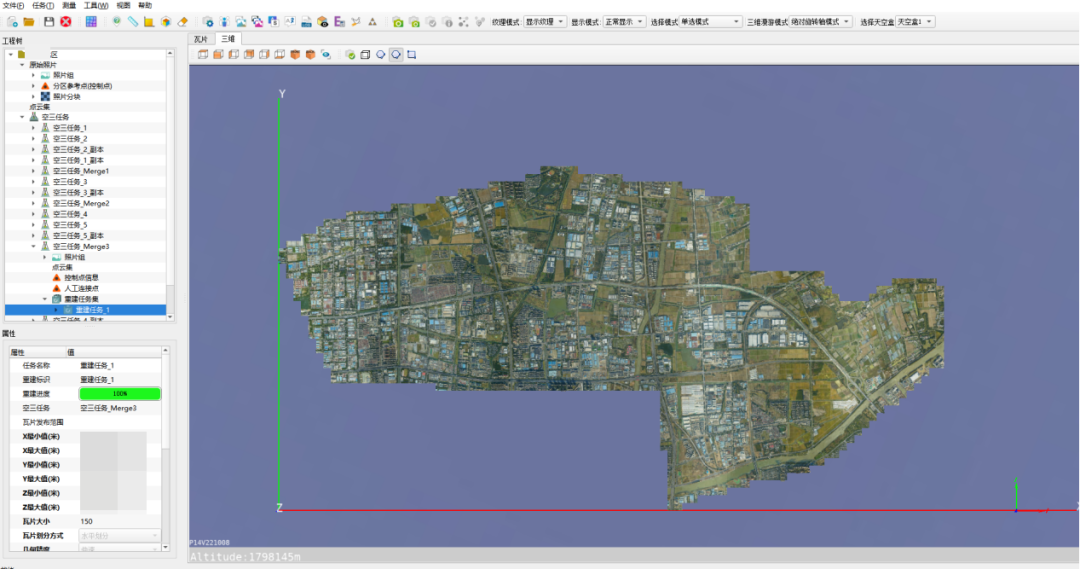
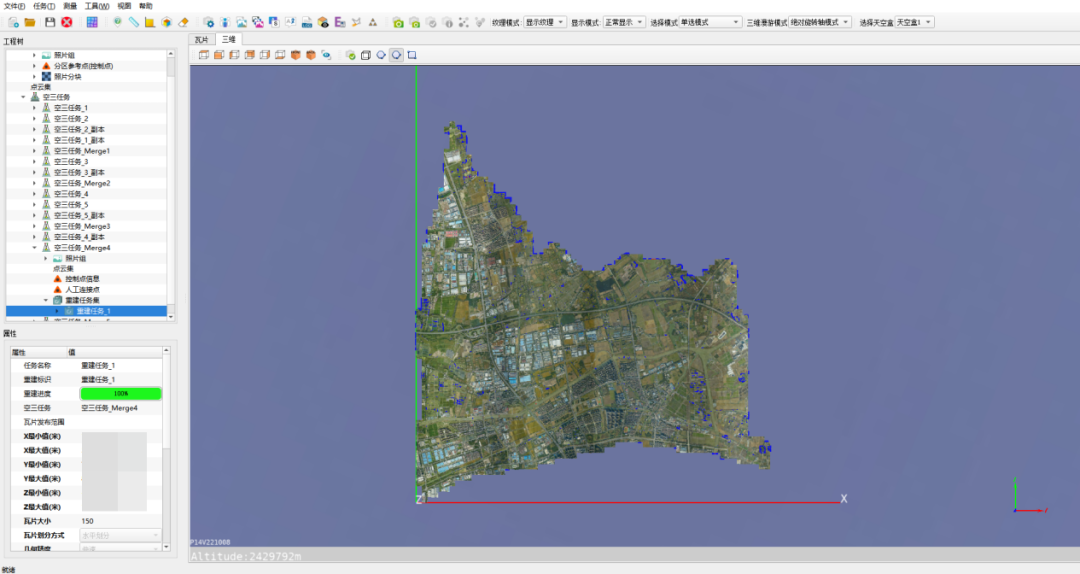
成果展示
数据成果展示:





澳门太阳集团2020(China)官方网站-Suncity Group
电话:4000-400-328
邮箱:support@soarscape.com
总部:上海市青浦区高光路215号北斗产业基地3栋2层
